

Wearing The Exoskeleton: To Robotize Or Humanize?
The superiority of the robotic exoskeleton over traditional treatments due to the high and consistent repetition of movements, balance, and stability was demonstrated to be a valuable functional recovery therapy during acute stroke inpatient rehabilitation.
“The goal of the computer is to provide people with the means to extend people’s mind and bodies. It is an exoskeleton that expands our human reach”.
Here we go with another topic continuing this article series on Supernatural: No More Sci-Fi, Human Enhancement Is Now Real; quoting Jean-Louis Gassee couldn’t fit better!
After our last navigation inside the mystery of the human brain and its powerful capabilities, body enhancements over any limit will take over this supernatural journey; but don't worry, you won’t start to look green like HULK.
A brief historical overview of the exoskeleton will open this theme, followed by the discussion around innovative applications in the medical field for rehabilitation purposes but also to prevent manual workers from experiencing severe injuries. Moreover, an HealthTec Innovation Design educational project aimed to develop a disruptive medical solution will be presented to conclude this article on body and movement enhancement.
What is an exoskeleton?
Worn as a bodysuit or only specific parts (e.g., to substitute human hands or shoulders), the exoskeleton is a motorized machine, often in metal, built to facilitate and support body mechanics while mirroring the human body and skeletal structure. Ideated to decrease physical effort during task performance, it was originally implemented to assist rehabilitation in the clinical setting. However, recent applications were also introduced in manufacturing and construction, in which intense labor activities are supported while lifting or moving heavy objects reducing the frequent risk of injuries.
The history of exoskeletons finds its start back in 1917 when Predomotor, the machine powered by a steam engine, was invented to lower the pressure on the body during running. Successively, based on a master/slave approach in 1965 General Electric’s Hardiman was created to augment human capabilities by 25-fold. Indeed, with this interface, the user (master) would have felt just one pound of force whereas the exoskeleton (slave) would have lifted 25 pounds. Nevertheless, nobody has been able to walk inside Hardiman due to several technical issues (e.g., power source, actuation, and control over the human-machine interaction) (1).
From robotic systems with lower limb pneumatic cylinders to the development of advanced upper-limb extenders, exoskeletons started to be implemented for rehabilitative purposes, particularly for lower-limb paralysis (1). Later on, Life Suite was built with the aim to regain walking in patients with paralysis and disabilities until today, Lokon is a company dedicated to providing exoskeletons for medical purposes supporting walking rehabilitation in patients with neurological damage but also easing the workforce of therapists.
Wearing the exoskeleton: a hopeful perspective
The possibility to regain motor functioning in paraplegic patients due to spinal cord injury was demonstrated possible by ReWalk, a powered exoskeleton (2) designed to support and restore mobility. Applied on 12 patients, the study demonstrated that after the active intervention with ReWalk the majority of individuals were able to walk again without human assistance, although variability in performance was observed among patients due to the severity of the injury. Furthermore, participants reported other physiological improvements and also a better emotional/psychological status after the intervention. The feasibility of ReWalk, as a safety device for in-hospital ambulation, was also demonstrated by other studies in which ambulation supported by the exoskeletal assisted walking was restored (3). However, regaining mobility should be evaluated in relation to the number of training sessions needed to reinforce proper walking while stimulating changes at sensory and motor level likewise its functionality and adaptability in a home setting (4). In addition, the importance of investigating and classifying different control strategies allowing the interaction and adaptability between the user and the device has also to be considered (5).
The superiority of the robotic exoskeleton over traditional treatments due to the high and consistent repetition of movements, balance, and stability was demonstrated to be a valuable functional recovery therapy during acute stroke inpatient rehabilitation (6). Developed by the integration of interdisciplinary fields, lower limbs exoskeletons incorporate several technologies to fulfill bionics and robotic characteristics.
Recently, a review (7) investigated several products implemented in rehabilitation and also state-of-the-art prototypes. Considering the goal of restoring human gait, research progresses, based on mechanics and control features, in lower limb exoskeleton implementation were examined. It was found that wearable forms of robots can be possible and controlling the movement of robots at each joint to support gait was the basics for developing robot-assisted rehabilitation training. A customized, flexible, and hybrid structure combining multimodal information is the technology needed to improve research on integrating human features with the mechanics of robots.
The possibility to maximize rehabilitation outcomes while improving quality of life in SCI patients would be proposed in hybrid protocols in which robotic exoskeletons are combined with other techniques such as gait training and functional electrical stimulation (FES) and possibly with brain-computer interfaces (BCI) systems, although more research is needed to prove the feasibility of robotic exoskeleton applications in outpatients and home-like environment (8).
Moreover, advanced researches in prosthetics were able to replace missing limbs in patients with amputations, although newly developed artificial limbs powered by A.I. still face a few challenges and limitations before leaving their Labs. Despite high-tech neuroprosthetics to sense residual muscle signals while robotically mimicking motion, they remain hardly affordable and uncomfortable to wear due to their metallic skeleton, making them heavy and very rigid. Recently, engineers at MIT and Shanghai Jiao Tong University have designed a soft, lightweight, and potentially low-cost neuroprosthetic hand. Developed on a system for tactile feedback, they found this prosthetic able to restore primitive sensation in an individual’s residual limb, although improvements in its design, mechanics, and functioning (e.g., sensing and range of motion) are still in progress.
Outside the medical field, we could also think of these technologies to assist intensive labor activities allowing workers to feel safer. Hence, in the future, these technologies might be either A.I. powered limbs could be implemented to augment the capacities of manual workers or wearing the exoskeleton to prevent injuries while lifting and moving heavy objects, particularly in the manufacturing and construction fields.
In conclusion, in the era of Industry 4.0, emerging technologies, and digital transformation, overcoming disabilities have been possible while being supported by crypto, blockchain, AI/ML and decentralized finance. Indeed, this is the wonderful story of Kieran McLeod; a 25-yr old paraplegic and former trader-turned-advisor to the world of enterprise finance. He was a guest speaker at the OpenExO Economy Town Hall event. In the clip below, you'll hear about his story, and see an exoskeleton in action.
ExoBot: an educational team project toward healthcare innovation design
At the Otto-von-Guericke-University (OVGU) in Magdeburg, Germany, a team project aimed toward the development of innovative health tech solutions was carried out during the attendance of a semester-long lecture titled HealthTec Innovation Design (HTID) created for medical students and biomedical engineers toward a futuristic view and application of exponential technologies. The lecture and project, initiated and supervised by Prof. Micheal Friebe, was developed by implementing the Purpose Launchpad meta-methodology tool, the OpenExO Canvas, the classical Business Model Canvas, and the Stanford Biodesign approach (9).
The team composed of Christoph Knoll, Anna Schaufler, Rutuja Salvi and I developed ExoBot; a technology to support and enhance motion overcoming motor dysfunctions in musculoskeletal disorders. An exoskeleton combined with FES and wirelessly connected to a mobile App was aimed to support rehabilitation while restoring movements, posture, mobility, and flexibility based on personalized and gamified training programs, and constantly adapted to the user’s need and health status. An innovative solution to an unsolved clinical need, ExoBot was designed not only for the guidance of professionals but particularly to empower patients’ autonomy and self-management while taking care of their own health individually from anywhere and at any time while democratizing healthcare costs and delivered services.
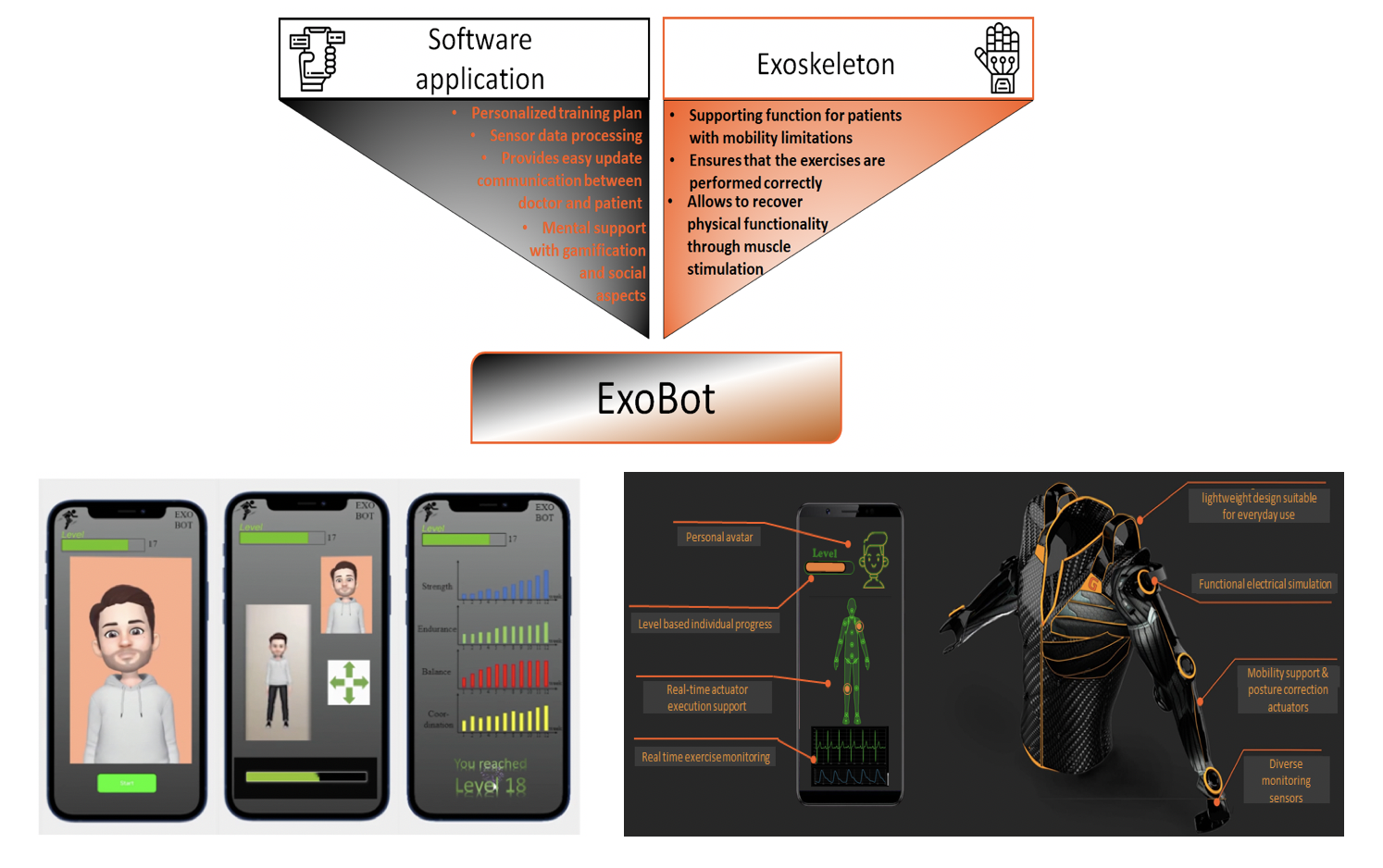
For a better insight into our team project, a minimum viable product (MVP) of the project can be viewed here:
Don’t limit your challenges. Challenge your limits
Coming to the end of this article on exoskeletons, artificial limbs, and body enhancement, we have seen that human capabilities have no limits. Once again, adding innovation and creativity to science and disruptive technologies are the key to unlock an abundance of exponential opportunities overcoming any natural and physical limit.
“Don’t limit your challenges. Challenge your limits.” (Jerry Dunn)
References:
- Daniel P. Ferris, Bryan R. Schlink, & Aaron J. Young, (2019). Robotics: Exoskeletons. Encyclopedia of Biomedical Engineering, pp. 645-651. ISBN 9780128051443 DOI: https://doi.org/10.1016/B978-0-12-801238-3.99906-9.
- Saulino, Michael MD, PhD The ReWalk Powered Exoskeleton to Restore Ambulatory Function to Individuals with Thoracic-Level Motor-Complete Spinal Cord Injury, American Journal of Physical Medicine & Rehabilitation: November 2012 - Volume 91 - Issue 11 - p 911-921 DOI: 10.1097/PHM.0b013e318269d9a3
- Yang A, Asselin P, Knezevic S, Kornfeld S, Spungen AM. Assessment of In-Hospital Walking Velocity and Level of Assistance in a Powered Exoskeleton in Persons with Spinal Cord Injury. Top Spinal Cord Inj Rehabil. 2015 Spring;21(2):100-9. DOI: 10.1310/sci2102-100. Epub 2015 Apr 12. PMID: 26364279; PMCID: PMC4568091.
- Khan, A.S., Livingstone, D.C., Hurd, C.L. et al. Retraining walking over ground in a powered exoskeleton after spinal cord injury: a prospective cohort study to examine functional gains and neuroplasticity. J NeuroEngineering Rehabil 16, 145 (2019). https://doi.org/10.1186/s12984-019-0585-x
- Baud R, Manzoori AR, Ijspeert A, Bouri M. Review of control strategies for lower-limb exoskeletons to assist gait. J Neuroeng Rehabil. 2021 Jul 27;18(1):119. DOI: 10.1186/s12984-021-00906-3. PMID: 34315499; PMCID: PMC8314580.
- Nolan, K.J, Karunakaran, K.K, Chervin, K., Monfett, M.R, Bapineedu, R.K, Jasey, N.N & Oh-Park, M. (2020). Robotic Exoskeleton Gait Training During Acute Stroke Inpatient Rehabilitation. Frontiers in Neurorobotics, 14:581815. DOI: 10.3389/fnbot.2020.581815
- Shi, D., Zhang, W., Zhang, W. et al. A Review on Lower Limb Rehabilitation Exoskeleton Robots. Chin. J. Mech. Eng. 32, 74 (2019). https://doi.org/10.1186/s10033-019-0389-8.
- Ashraf S. Gorgey, Ryan Sumrell, & Lance L. Goetz (2019). 44 - Exoskeletal Assisted Rehabilitation After Spinal Cord Injury, Editor(s): Joseph B. Webster, Douglas P. Murphy, Atlas of Orthoses and Assistive Devices (Fifth Edition), Elsevier, 2019, pp. 440-447.e2, ISBN 9780323483230, DOI: https://doi.org/10.1016/B978-0-323-48323-0.00044-5.
- Fritzsche H, Barbazzeni B, Mahmeen M, Haider S. and Friebe M (2021). A Structured Pathway Toward Disruption: A Novel HealthTec Innovation Design Curriculum With Entrepreneurship in Mind. Frontiers in Public Health, 9:715768. DOI: 10.3389/fpubh.2021.715768
ExO Insight is a written word publication for exponential insights from thought leaders including members of our OpenExO community. We tell stories of transformation while hoping to inspire and drive change in the world for positive impact. If you don't want to miss an article, be sure to subscribe here.

ExO Insight Newsletter
Join the newsletter to receive the latest updates in your inbox.








{kind=link}